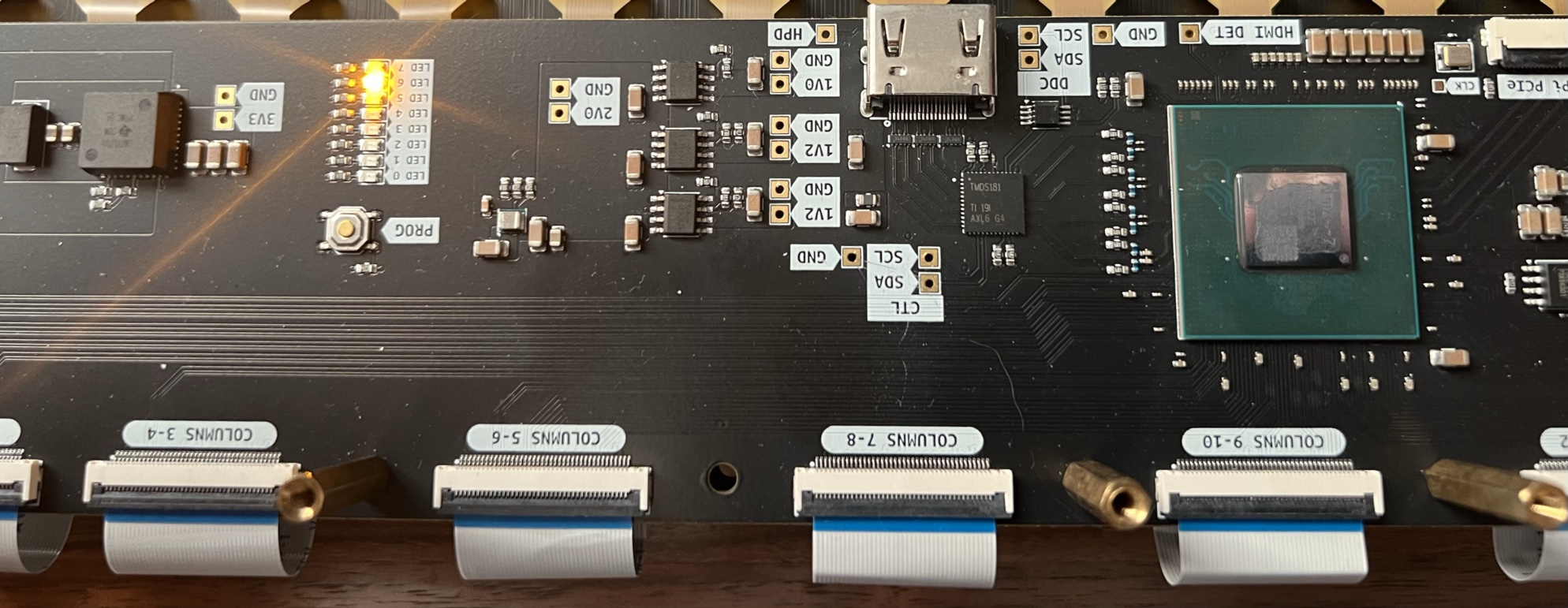
“But what if every button is also a screen?” That’s the question that started a multi-year project to build a custom electronic music production device, the SoundSlab. One glorious day it will be part sequencer, part sampler, part synthesizer, and part slab. Today it’s a never-ending hobby project. Here I’ll show you how that project started with impulse buying, a CNC milled PCB, self-inflicted PCB assembly pain, mechanical CAD, 3D printing, and some FPGA fun.
Over the last few years, Rust tooling for embedded development has become quite good. Specifically, the probe-rs and defmt (with RTT) projects address common needs like downloading firmware, running tests in-situ, logging with minimal overhead, and catching crashes. ARM-based microcontrollers, such as the STM32 family, are well supported nowadays. RISC-V support is still expanding, but the basics are all there.
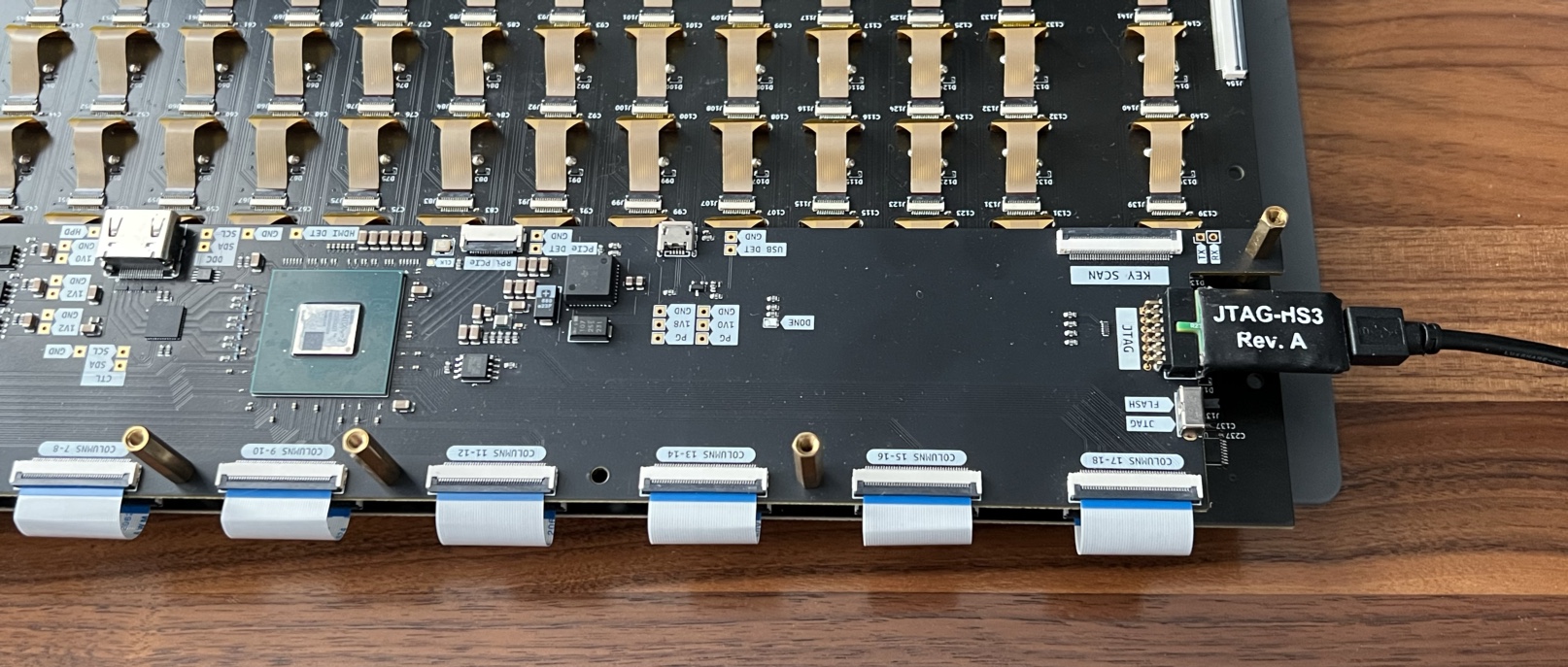
I’d like to take advantage of these embedded Rust tools while developing firmware on a VexRiscv FPGA soft core. So, in this post I’ll show how I convinced probe-rs to play nice with my JTAG adapter, connect over a JTAG tunnel, and run from RAM without breaking defmt-rtt logs.
Wouldn’t it be nice if the same JTAG cable used to configure a FPGA could also debug a RISC-V core implemented in the fabric? Turns out, it’s possible! For a new project using a VexRiscv core to control a few things, I wanted to try tunneled JTAG access. Also, I may have forgotten to add a separate JTAG header on my board design… Anyway, I’ll share how to configure VexRiscv and OpenOCD to use one cable for both.
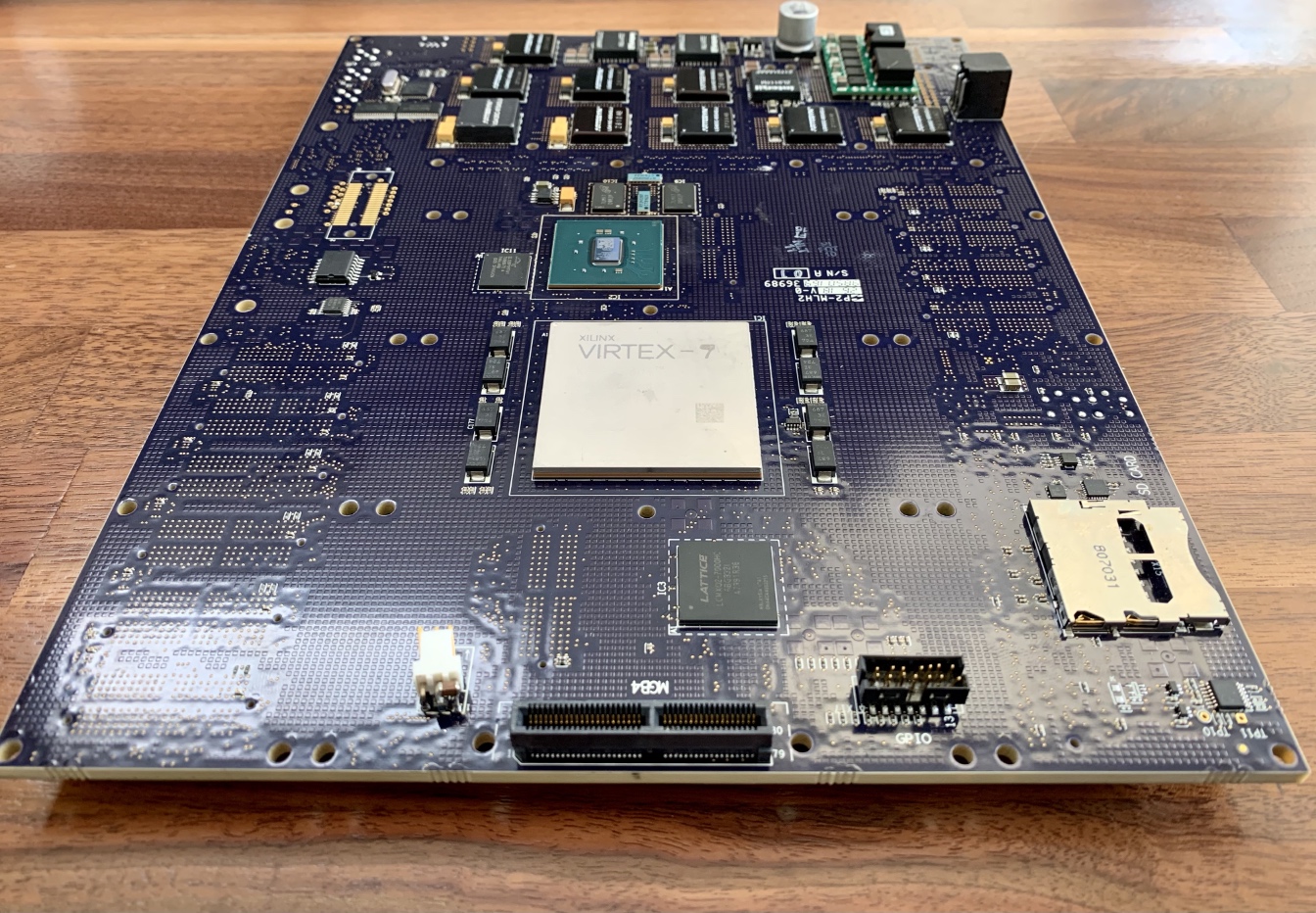
eBay is a magical place, somewhere in the middle of the vast AliExpress-Digikey spectrum… well, it is magical for those interested in giant FPGA parts anyway. In previous posts, I detailed the Gameslab, which is a handheld game console built around reballed Zynq (XC7Z035) parts off eBay, which turned out to be perfectly fine after fixing my own mistakes. So, I’m no stranger to the hopes and fears of buying used and unknown quality FPGA components off eBay. That said, thanks to @rombik_su on Twitter, I’m down an even deeper rabbit hole on a HAPS-DX7 board with a Xilinx Virtex-7 XC7VX980T (whopping 612 kLUTs), a smaller Kintex XC7K70T, and a relatively tiny Lattice LCMXO2-7000HC. I’ll try to document the journey in this post.
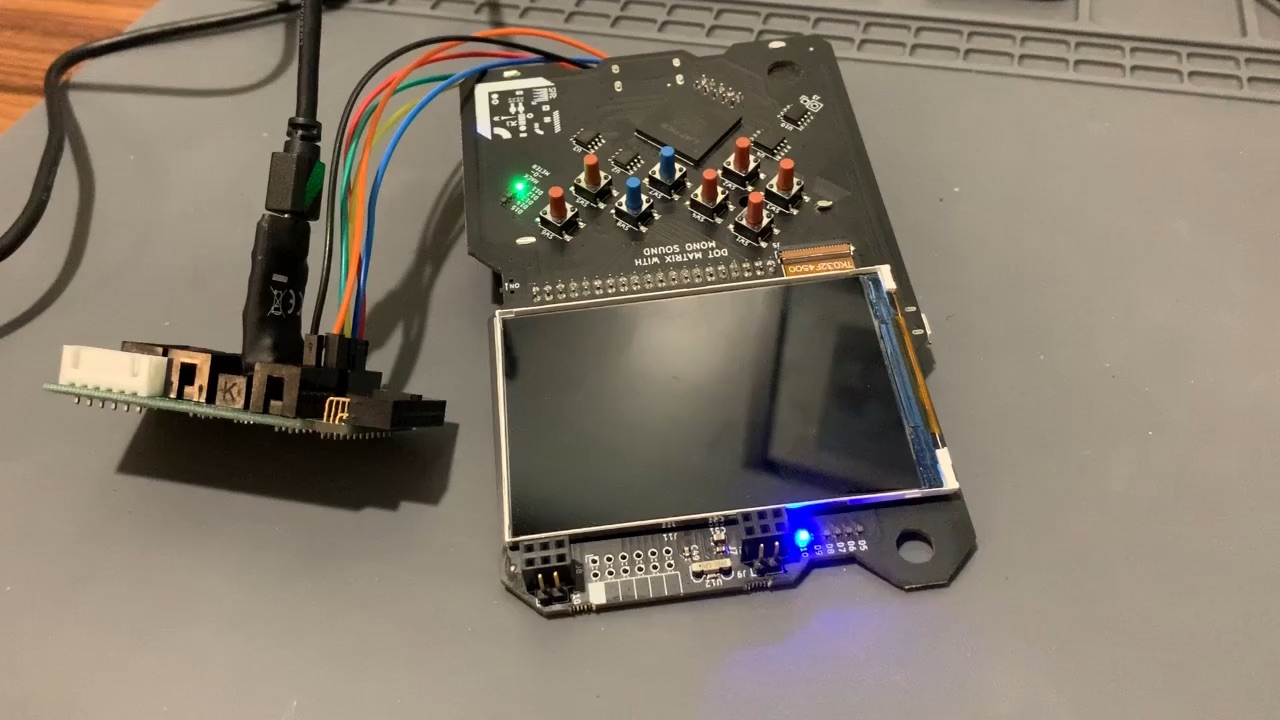
What do Rust, Risc-V, and SpinalHDL all have in common? They can all run on the Hackaday Supercon 2019 badge! In this rather lengthy post, I go through how to get started with SpinalHDL on the badge, how to setup a Risc-V soft core using VexRiscv, how to assemble a basic program for it, and finally how to target and build embedded Rust for it.
This week I had the awesome opportunity to interview David Galloway, a long-time game developer across many platforms. We met because I was wrong about the nature of the Game Boy CPU in this post, and I’m glad I made that mistake, because what an amazing guy to meet! In this extra-length interview, we discuss early 6052 games, Apple II game development, early 1990s game dev, Game Boy dev, speed-code for sprites, texture atlases, radiosity maps, video card drivers, and more!
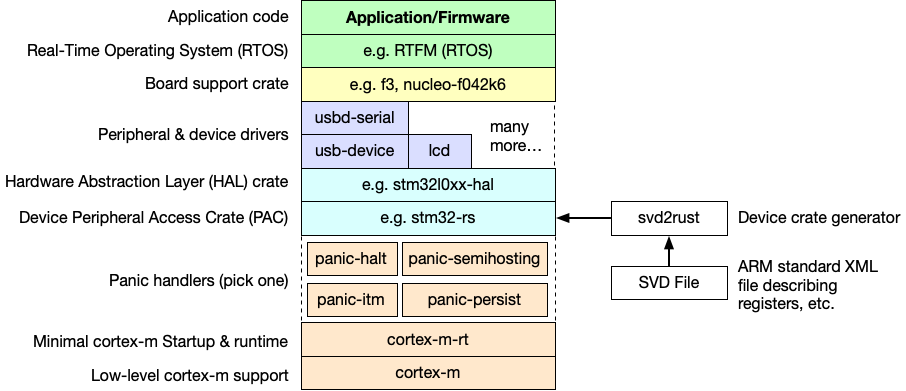
The embedded Rust development ecosystem is changing fast. A bunch has changed even since early 2019 when I started prototyping firmware for the Gameslab’s system controller (STM32L0). Most of the changes are incredible! Device support crates, hardware abstraction layers (HALs), and even USB support are all very usable now for Cortex-M devices. In this post, I’ll summarize the ecosystem and show how to get started with embedded Rust on a STM32L0 part.
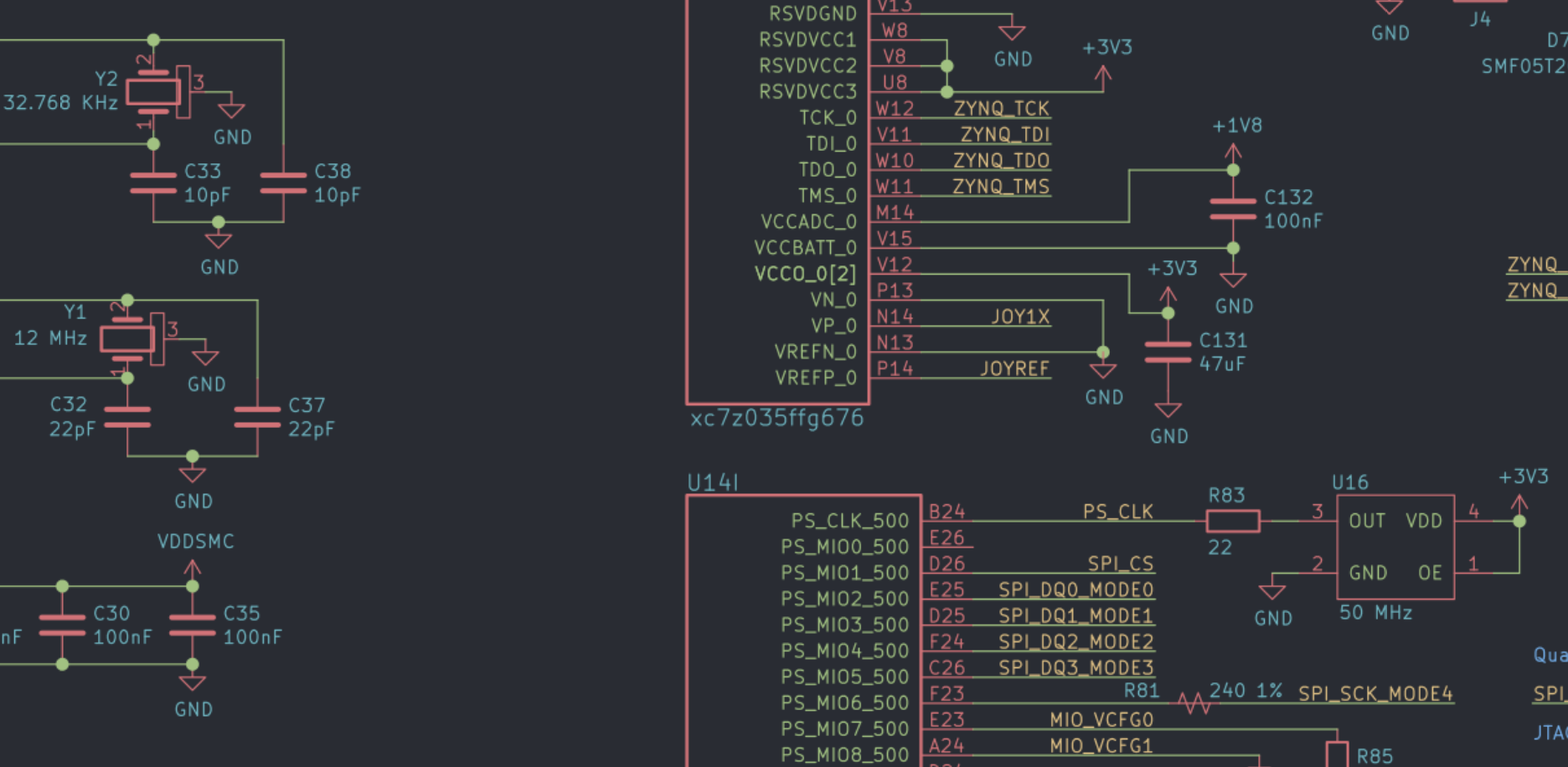
Here’s the Gameslab schematic in all of its completely non-cost-optimized glory! I had linked to it in a previous post, but this makes it more obvious. Made with KiCad!
The Gameslab case is made of three custom-machine aluminum plates and held together by only four screws. Notice there aren’t any screw holes showing on the front.